|
I am a PhD student in the Intuitive Robots Lab (IRL) at the Karlsruhe Institute of Technology (KIT), Germany supervised by Rudolf Lioutikov My research focuses on Learning robust policies from multiple modalities for robot manipulation tasks. Previously, I obtained my Master Degree in Embedded Systems(Computer Science) at the Saarland University where I wrote my thesis at Max Planck Institute supervised by Vladislav Golyanik. Email / CV / Google Scholar / Github / LinkedIn |

|
|
My research focuses on developing robust robot policies that can operate reliably in complex, real-world environments by leveraging multiple sensor modalities, such as vision, force, tactile, and language. I aim to build intelligent embodied agents that learn fine grained manipulation skills to perform a given task. This includes designing models adapting to sensor failures, noise, or incomplete observations, thereby improving resilience and reliability. |
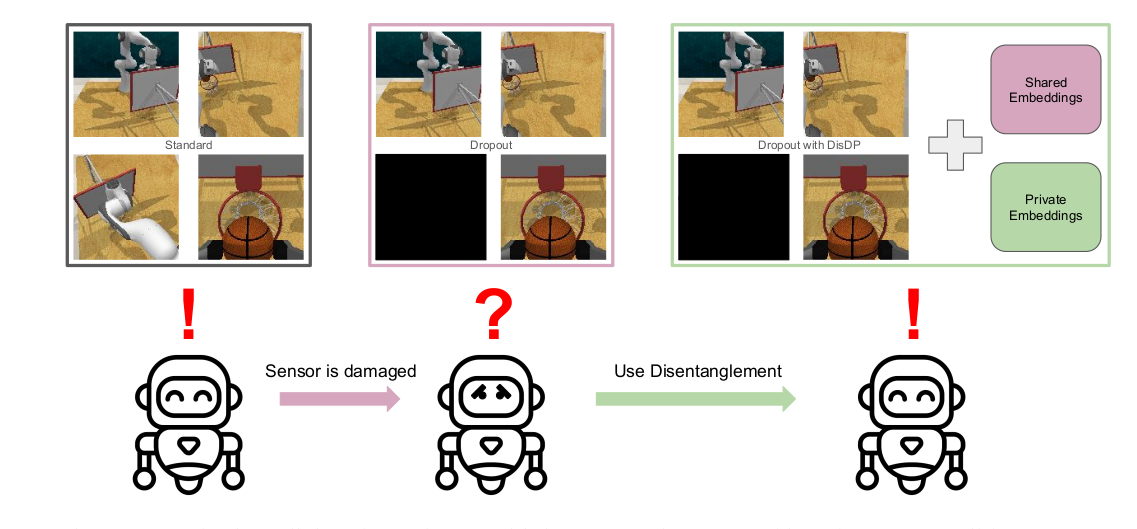
Pankhuri Vanjani, Paul Mattes, Xiaogang Jia, Vedant Dave, Rudolf Lioutikov Reinforcement Learning Conference(RLC) 2025, Ext. Abstract at German Robotics Conference (GRC) 2025 OpenReviewnet This work introduces Disentangled Diffusion Policy (DisDP), an Imitation Learning (IL) method that enhances robustness by integrating multi-view disentanglement into diffusionbased policies. For robots to be deployed on a large scale across various applications they have to be robust against different perturbations, including sensor noise, complete sensor dropout and environmental variations. Existing IL methods struggle to generalize under such conditions, as they typically assume consistent, noise-free inputs. To address this limitation, DisDP structures sensory inputs into shared and private representations, preserving task-relevant global features while retaining distinct details from individual sensors. Additionally, Disentangled Behavior Cloning (DisBC) is introduced, a disentangled Behavior Cloning (BC) policy, to demonstrate the general applicance of disentanglement for IL. This structured representation improves resilience against sensor dropouts and perturbations. Evaluations on The Colosseum and Libero benchmarks demonstrate that disentangled policies achieve better performance in general and exhibit greater robustness to any perturbations compared to their baseline policies. |
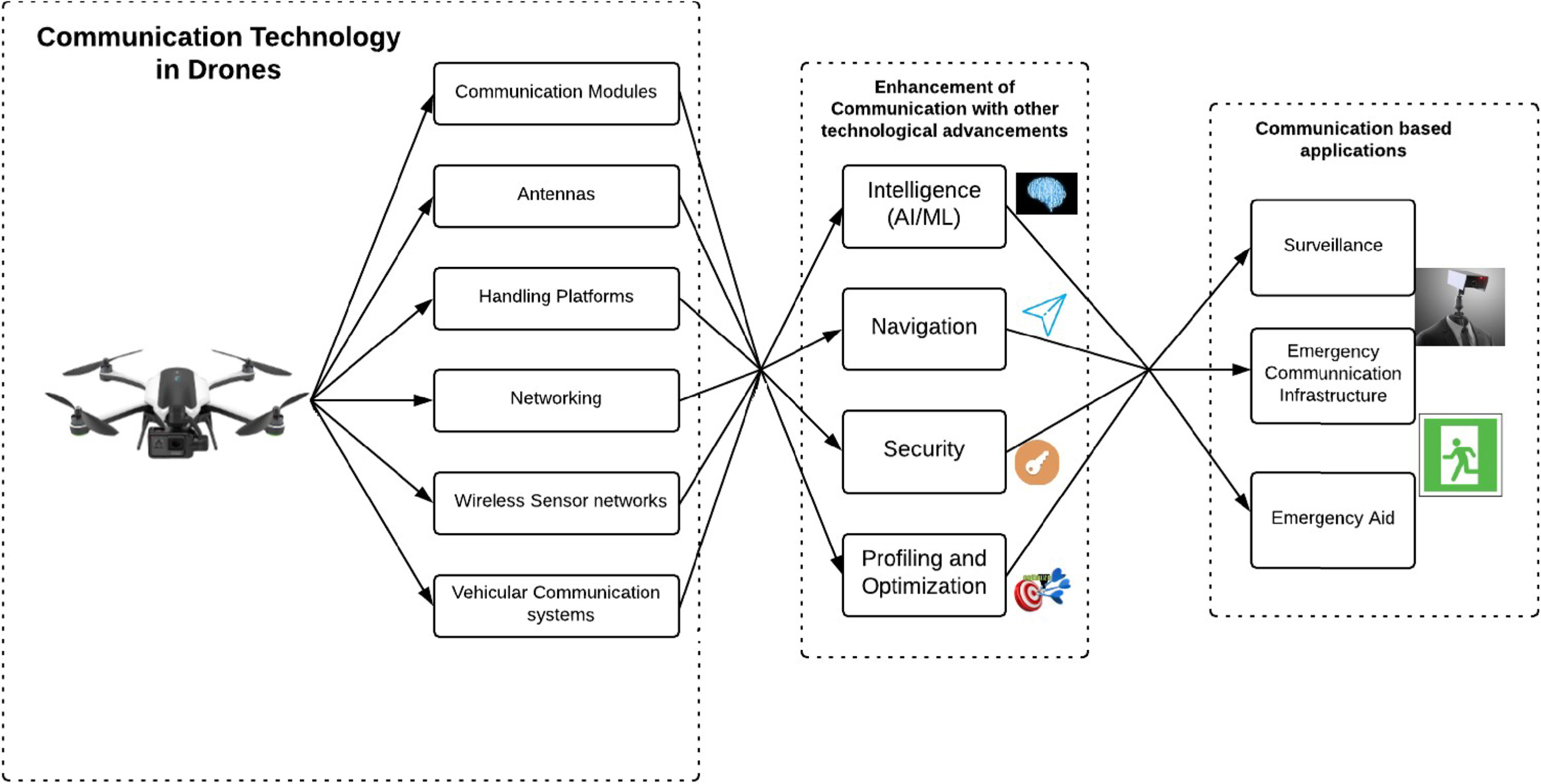
Journal of Network and Computer Applications, 2020 sciencedirect This paper aims at providing insights into the latest UAV (Unmanned Aerial Vehicle) communication technologies through investigation of suitable task modules, antennas, resource handling platforms, and network architectures. Additionally, we explore techniques such as machine learning and path planning to enhance existing drone communication methods |
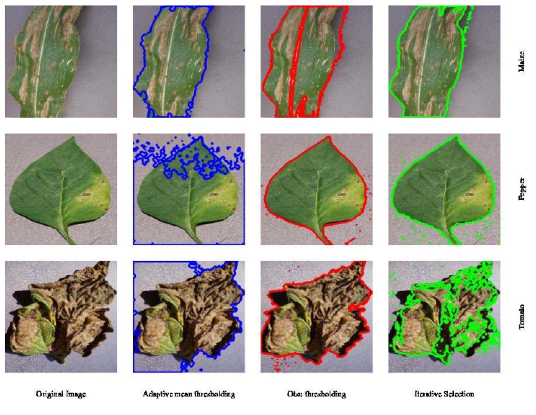
International Journal of Social and Humanistic Computing, 2019 researchgate This paper presents improved image processing algorithms for detecting leaf infections and uses k-means clustering for agricultural field classification in a heterogeneous robotic system. The approach leverages a dataset of 3,150 crop disease images across three crop types, aiming to enable early disease detection and support mixed cropping via smart farming technologies. |
|
The website is based on the code from source code! |